Acções do Documento
CARLoS
CooperAtive Robot for Large Spaces manufacturing
O projeto CARloS tem como objetivo aplicar os recentes avanços da área dos robôs móveis cooperativos num cenário industrial de elevado impacto que é o do fabrico em estaleiros navais. O robô CARloS será construÃdo a partir de tecnologia de estado de arte já existente usando uma abordagem modular. O protótipo final será demonstrado como um robô cooperativo para aplicações de fit-out, revestimentos e instalações, dentro de blocos de superstruturas de navios, nomeadamente as operações de soldadura de pernos e marcação de instalações.
O projeto CARLoS insere-se no âmbito do robô trabalhador colaborativo, que é uma das linhas estratégicas na agenda para investigação em robótica na Europa. Este objetivo visa o desenvolvimento de robôs móveis capazes de trabalhar com humanos partilhando o espaço sem barreiras fÃsicas de segurança.
Durante os últimos anos, um conjunto de projetos de investigação incidiu sobre este tópico nas suas diferentes vertentes. Como resultado, um considerado corpus de conhecimento e ferramentas está disponÃvel para ser testado em problemas industriais que apresentam nÃveis de automação reduzidos.
Espaços de fabrico de grandes dimensões e parcialmente estruturados apresentam desafios em termos de mobilidade, segurança e fiabilidade. Este é o caso do fabrico de navios. Os estaleiros exibem caraterÃsticas únicas que constituem um desafio, mas também representam uma oportunidade para o desenvolvimento de robôs móveis capazes de desenvolver tarefas árduas e repetitivas nas quais a produtividade não pode ser melhorada. As atividades de fabrico naval representam uma faturação anual de 30000M€ e empregam 500000 pessoas, apenas na Europa. Estes números, em conjunto com as caracterÃsticas de pequenas séries da construção naval, realçam a complexidade das operações e o mercado potencial para a introdução de tecnologias de automação.
O problema de fabrico em que o projeto CARloS se foca são as tarefas de soldadura de pinos e marcação de instalações a partir de informação CAD na superestrutura ainda em bruto. Estas tarefas servem de suporte às tarefas subsequentes de fit-out, instalações e revestimentos. Estima-se que apenas estas operações devam ter um mercado estimado de 3000M€ para um robô capaz de realizar estas tarefas.
LÃder do projeto:
- Coordenador do Projeto – AIMEN, Antón Garcia, anton.garcia@aimen.es;
- Coordenador INESC TEC – Germano Veiga, germano.veiga@inesctec.pt.
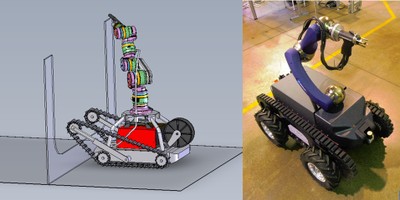
Figura: Conceito do robô CARloS e o primeiro protótipo.
Parceiros:
- AIMEN- Asociación de Investigación Metalúrgica del Noroeste, Espanha;
- AAU- AALBORG UNIVERSITET, Dinamarca;
- INESC PORTO - Instituto de Engenharia de Sistemas e Computadores, Portugal;
- ROBOTNIK - ROBOTNIK AUTOMATION SLL, Espanha;
- CAT - C.A.T. Progetti srl, Itália;
- DELTAMATIC- DELTAMATIC, S.A, Portugal;
- ATENASA - ATEIN NAVAL, S.A., Espanha;
- VALIÑA - ASTILLEROS JOSE VALIÑA S.A., Espanha.
Financiamento: FP7 - Comissão Europeia, 1.2 M€
Página oficial do projeto: www.carlosproject.eu
Contacto: Germano Veiga (germano.veiga@inesctec.pt)
