AcûÏûçes do Documento
CYCLOPS (notûÙcia)
LIDAR com uma CûÂmara de um ûnico PûÙxel Baseada em SensorizaûÏûÈo Compressiva
Protû°tipo para aquisiûÏûÈo de imagem LIDAR 3D vai integrar futuras missûçes espaciais
O Centro de Fotû°nica Aplicada (CAP) do INESC TEC concluiu o primeiro protû°tipo de um sistema com tecnologia Light Detection And Ranging (LIDAR), que mede as propriedades da luz refletida de modo a obter informaûÏûçes como a distûÂncia e a forma 3D de um determinado objeto. O sistema poderûÀ auxiliar na aterragem de sondas, na navegaûÏûÈo de robûÇs na superfûÙcie de planetas ou na recolha e transporte de amostras do solo, e deverûÀ equipar os veûÙculos das prû°ximas missûçes de exploraûÏûÈo do planeta Marte. O protû°tipo foi desenvolvido no ûÂmbito do projeto CYCLOPS que junta o INESC TEC e a Agûˆncia Espacial Europeia (ESA).
 |
 |
Sensor com
um pixel captura imagens 3D com resoluûÏûÈo de 1024x768
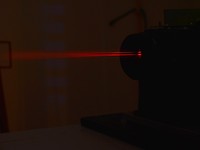
Mais leve, compacto, eficaz e sustentûÀvel, o LIDAR (parecido com um radar mas com radiaûÏûÈo laser), que foi desenvolvido com base numa teoria revolucionûÀria denominada de ãcompressive sensingã (sensorizaûÏûÈo compressiva), permite medir distûÂncias e capturar imagens 2D e 3D com uma resoluûÏûÈo de 1024 por 768 pixûˋis.
A tecnologia diferencia-se dos sistemas convencionais sobretudo por nûÈo ter partes mû°veis (o que ûˋ vantajoso para aplicaûÏûçes a nûÙvel espacial, pois nûÈo levanta problemas de alinhamento, vibraûÏûÈo ou lubrificaûÏûÈo, por exemplo), por nûÈo realizar varrimento da ûÀrea a inspecionar e por ter um sensor com apenas um pixel que permite, ainda assim, adquirir imagens com 1024 por 768 pixûˋis e com menos mediûÏûçes do que o habitualmente necessûÀrio. ãOutra vantagem do sistema ûˋ a possibilidade de miniaturizar o sensor, reduzindo substancialmente a massa e a potûˆncia consumida, exponenciando o nû¤mero de aplicaûÏûçes e missûçes espaciais para o qual pode ser considerado no futuroã, acrescenta o Technical Officer da ESA, JoûÈo Pereira do Carmo.
 |
 |
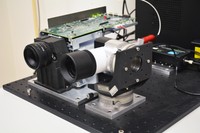
A integraûÏûÈo deste sistema desenvolvido pelos investigadores do CAP, Filipe MagalhûÈes e Francisco Araû¤jo, permitirûÀ identificar qual a melhor localizaûÏûÈo para a aterragem dos veûÙculos espaciais na Lua ou em Marte, atravûˋs da anûÀlise topogrûÀfica do terreno, tendo por base a aquisiûÏûÈo de imagens e as respetivas distûÂncias registadas para cada pixel da imagem. Os robûÇs exploradores na superfûÙcie do planeta tambûˋm podem detetar obstûÀculos e movimentar-se mais facilmente graûÏas û s potencialidades abertas por este sistema. Alûˋm disso, o protû°tipo pode ainda facilitar a recolha e o transporte de amostras do solo de Marte para a Terra, ao localizar a posiûÏûÈo exata da cûÀpsula em û°rbita com as amostras.
No entanto, o sistema nûÈo se aplica apenas û exploraûÏûÈo de planetas ou corpos celestes e esta tecnologia pode ter tambûˋm diversas utilizaûÏûçes em cenûÀrios mais habituais, como levantamento topogrûÀfico, navegaûÏûÈo autû°noma de veûÙculos ou aplicaûÏûçes militares (por exemplo, visûÈo atravûˋs de camuflados ou visûÈo noturna).
 |
 |
Protû°tipo chegarûÀ ao Planeta Vermelho em 2018
Para jûÀ o protû°tipo laboratorial estûÀ apenas a ser utilizado como prova de conceito, mas em 2018 poderûÀ pisar o solo de Marte. Nessa altura terûÀ de ser adaptado û s condiûÏûçes algo adversas do Planeta Vermelho, tais como temperaturas extremamente baixas, tempestades de areia e ventos fortes. ãOs componentes eletrû°nicos, û°ticos e mecûÂnicos deverûÈo entûÈo atender a requisitos de temperatura, radiaûÏûÈo e vibraûÏûÈo caracterûÙsticos das cruzadas espaciais jûÀ que sûÈo vulgarmente produzidos para temperaturas que podem variar entre os -20ô¤C e os 40ô¤C, ao passo que no espaûÏo as temperaturas podem descer atûˋ -100ô¤C ou subir atûˋ +300ô¤C, pelo que ûˋ preciso utilizar componentes especiais que suportem tais gamas de operaûÏûÈoã, explica o investigador do CAP Filipe MagalhûÈes.
O INESC TEC ûˋ uma das poucas instituiûÏûçes do mundo a trabalhar na aplicaûÏûÈo desta tecnologia û exploraûÏûÈo espacial e concorre com diversos organismos que querem ver a sua tecnologia associada û exploraûÏûÈo espacial, um mercado de infinitas potencialidades. ãA inexistûˆncia, na Europa, de detetores de grande resoluûÏûÈo para a obtenûÏûÈo de imagens 3D (como os necessûÀrios para as aplicaûÏûçes espaciais referidas) e os elevados custos do seu possûÙvel desenvolvimento, levaram a ESA a promover soluûÏûçes alternativas e de grande potencial como a proposta pelo INESC TECã, refere JoûÈo Pereira do Carmo.
 |
 |
Ainda assim, nûÈo ûˋ a primeira vez que o Laboratû°rio Associado dûÀ provas no espaûÏo e jûÀ noutra ocasiûÈo foi escolhido pela ESA para criar soluûÏûçes que podem ser adaptadas û engenharia aeroespacial. Recorde-se, por exemplo, o projeto europeu ESA-ONE, de monitorizaûÏûÈo de diû°xido de carbono na atmosfera.
Sistema entrarûÀ numa segunda fase jûÀ no inûÙcio do prû°ximo ano
O protû°tipo foi gerado no ûÂmbito do projeto CYCLOPS (em alusûÈo aos gigantes da mitologia grega possuidores de um sû° olho, tal como o sistema tem um detetor com sû° um pixel) cujo principal objetivo ûˋ o desenvolvimento de um sistema para aquisiûÏûÈo de imagens LIDAR com uma cûÂmara de um û¤nico-pixel baseada em sensorizaûÏûÈo compressiva para ser usado em missûçes espaciais, em particular a Marte. û um projeto que reû¤ne exclusivamente o INESC Porto e a Agûˆncia Espacial Europeia (ESA).
 |
 |
O INESC TEC conta arrancar com uma segunda fase de desenvolvimento deste sistema inovador jûÀ no inûÙcio de 2014. Nesta prû°xima fase, os investigadores esperam desenvolver um sistema com um nûÙvel de maturaûÏûÈo tecnolû°gica superior (TRL 4 ou superior) e, por conseguinte, mais bem adaptado û s exigûˆncias da operaûÏûÈo no EspaûÏo. ãDeverûÀ tambûˋm ser ainda mais rûÀpido, compacto, leve e com menores requisitos de potûˆncia elûˋtricaã, revela Filipe MagalhûÈes.
A partir
dessa altura, o projeto, que atûˋ agora tem sido desenvolvido em exclusivo pelo
INESC TEC e pela ESA, deverûÀ contar com a colaboraûÏûÈo da empresa EFACEC,
atravûˋs da sua ûÀrea de desenvolvimento aeroespacial.
